Exploring the State of the Art in Visual SLAM for Robotics
Recent advancements in Visual Simultaneous Localization and Mapping (V-SLAM) technologies have significantly enhanced the capabilities of robotic systems. Our latest issue delves into these groundbreaking developments, spotlighting the most cutting-edge V-SLAM techniques designed to amplify robotic functionality.
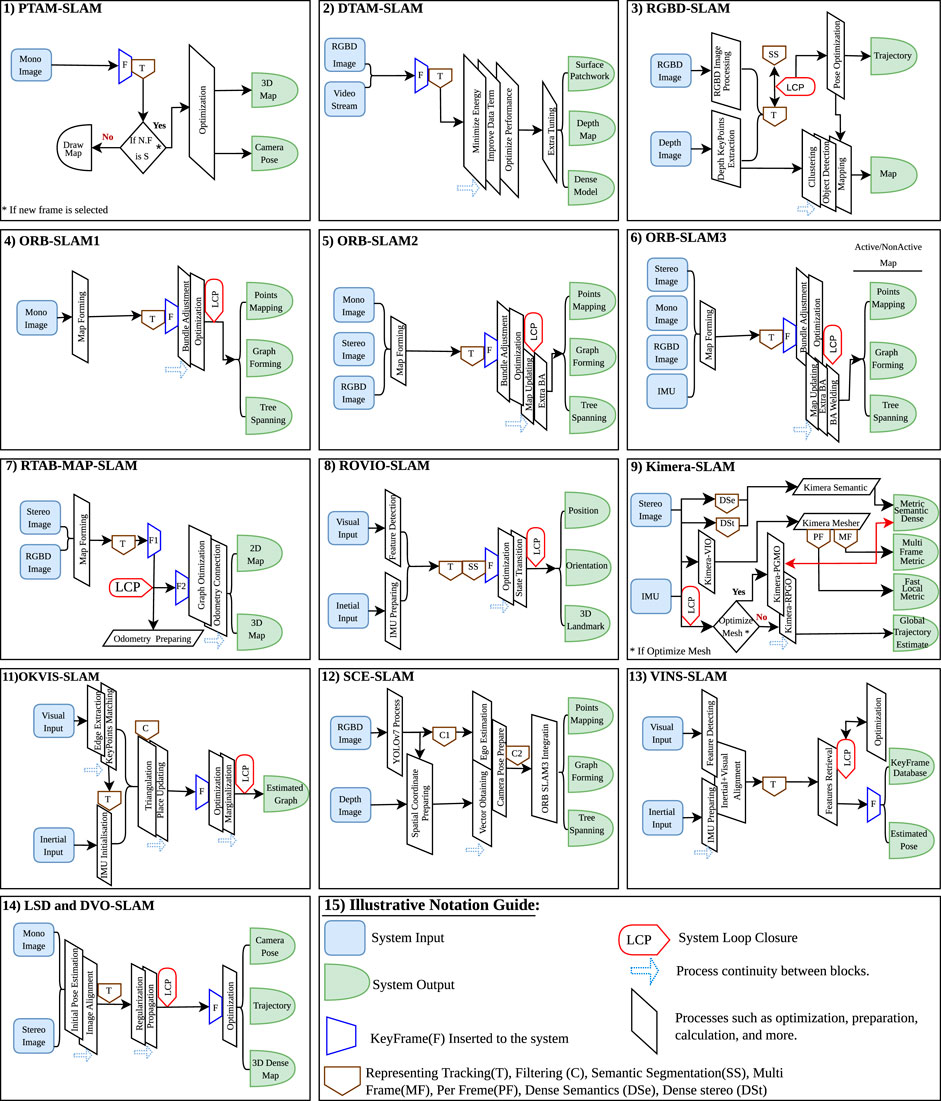
A review of visual SLAM for robotics: evolution, properties, and future applications
As robotics becomes more integrated into real-world tasks, the need for autonomous mobility fertifies. In the recent years, a variety of V-SLAM techniques have been developed to enhance robot functionality. In our journal we spotlight the most recent advancements in V-SLAM technology and provide guidelines for selecting the most appropriate method for specific robotic projects. We trace the development of SLAM technologies over time, emphasizing fundamental concepts and offering side-by-side comparisons.
Fulltext Access
https://www.frontiersin.org/articles/10.3389/frobt.2024.1347985/full
Citing
@ARTICLE{10.3389/frobt.2024.1347985,
AUTHOR={Al-Tawil, Basheer and Hempel, Thorsten and Abdelrahman, Ahmed and Al-Hamadi, Ayoub},
TITLE={A review of visual SLAM for robotics: evolution, properties, and future applications},
JOURNAL={Frontiers in Robotics and AI},
VOLUME={11},
YEAR={2024},
URL={https://www.frontiersin.org/articles/10.3389/frobt.2024.1347985},
DOI={10.3389/frobt.2024.1347985},
ISSN={2296-9144}}