News
News & blog posts
Final Meeting in Nagold
November 27, 2025
On November 27, 2025, the final meeting of the project took place at Demonstrator Integration MartinMechanic in Nagold.
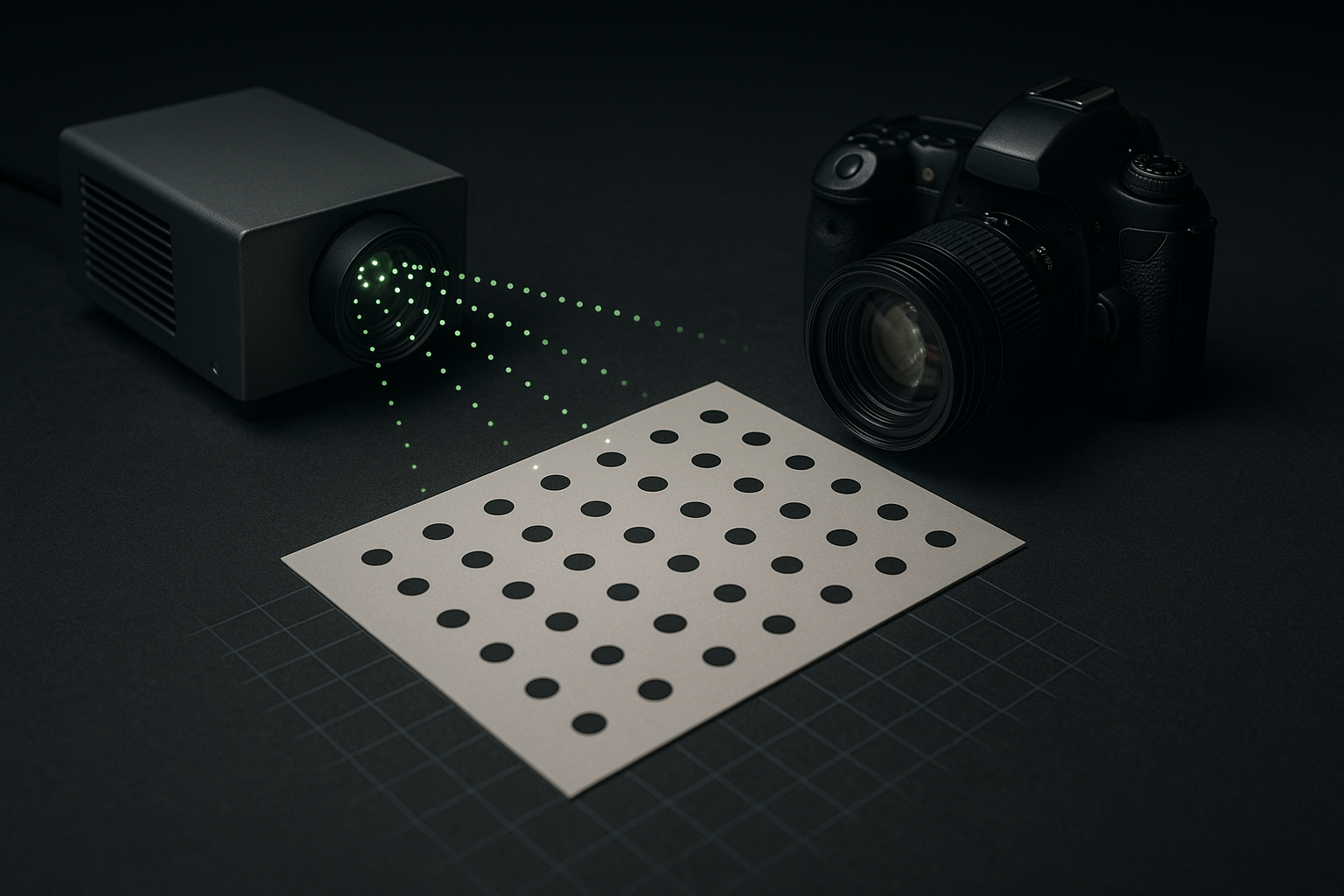
Accurate Projector-Camera-Calibration from Structured Light Dot Patterns via Subpixel Plane Reconstruction
November 15, 2025
An accurate projector-camera calibration method using structured light dot patterns with subpixel plane reconstruction for high-precision 3D measurement.
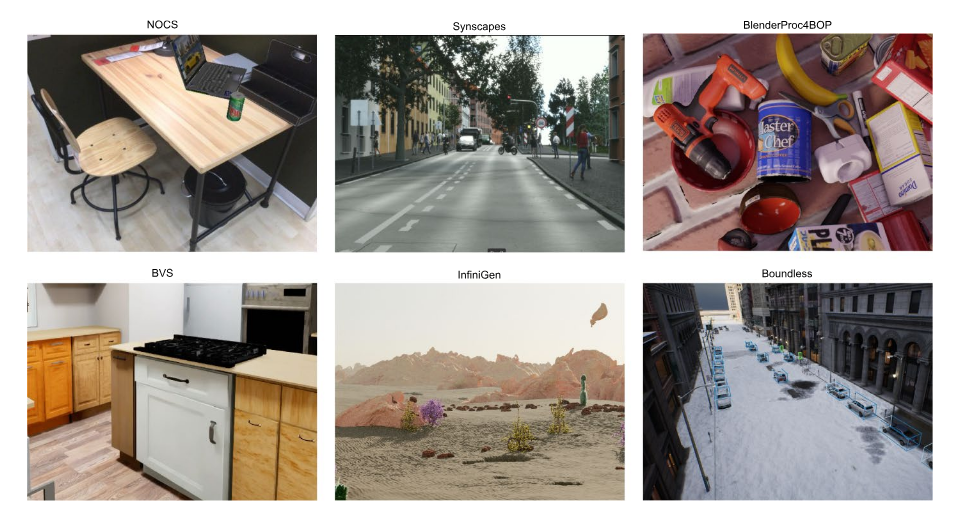
Automating Synthetic Dataset Generation for Image-based 3D Detection: A Literature Review
October 19, 2025
A comprehensive review of synthetic dataset generation approaches for 3D object detection, covering both traditional 3D modeling and neural image...
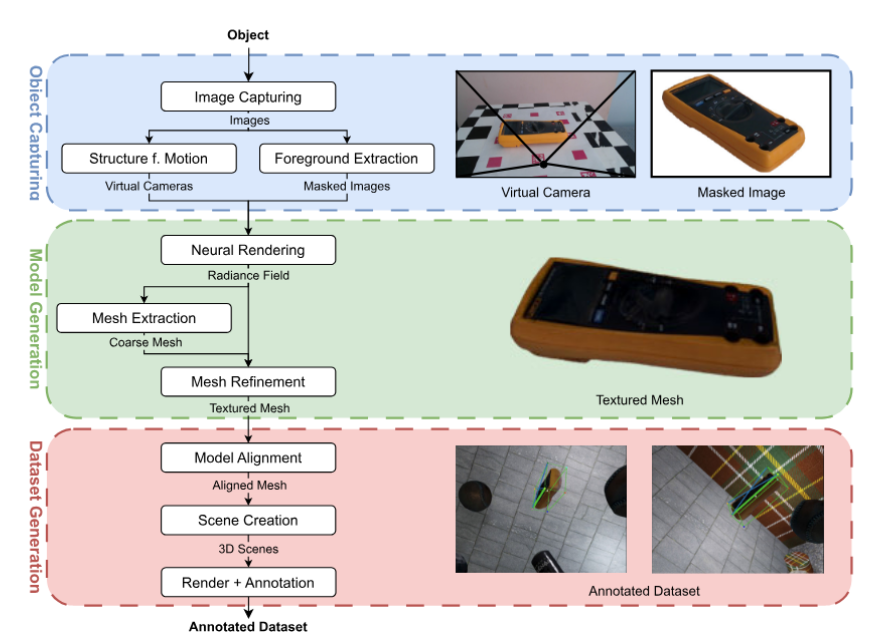
Automated 3D Dataset Generation for Arbitrary Objects
October 10, 2025
An end-to-end pipeline that automates all aspects of 3D dataset generation by leveraging Radiance Fields for high-quality 3D modeling and...
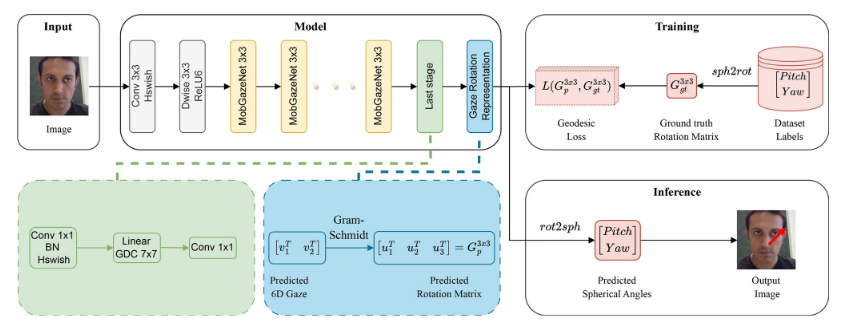
MobGazeNet: Robust Gaze Estimation Mobile Network Based on Progressive Attention Mechanisms
May 09, 2025
An efficient and lightweight network for gaze estimation that leverages progressive attention mechanisms to emphasize crucial eye features while maintaining...
Multi-Head Attention-Based Framework with Residual Network for Human Action Recognition
May 06, 2025
An efficient deep learning framework for human action recognition that integrates ResNet-18 for spatial feature extraction, Bi-LSTM for temporal modeling,...
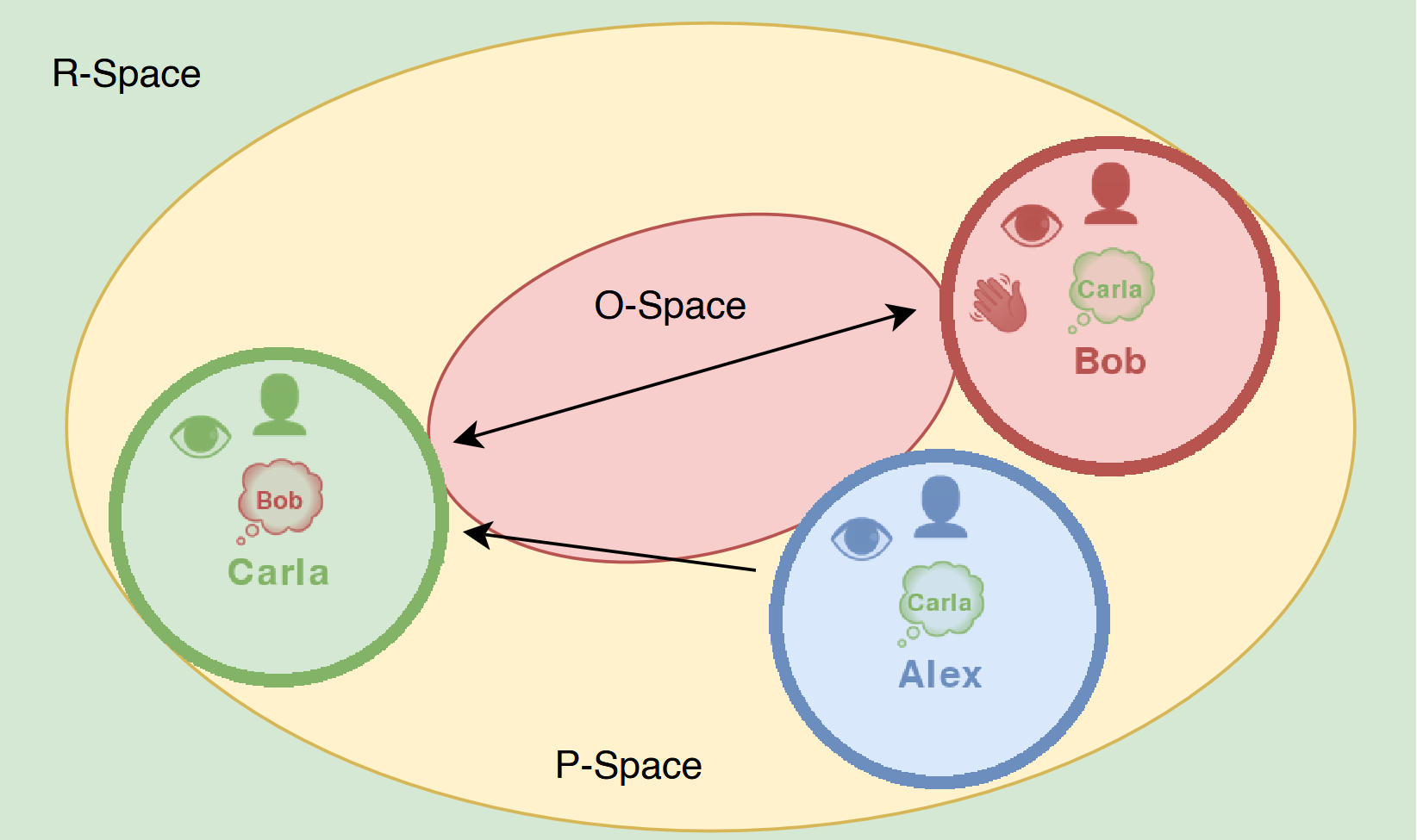
IM HERE – Interaction Model for Human Effort based Robot Engagement
April 29, 2025
We present our novel engagement modeling framework IMHERE, designed to improve human-robot interaction by capturing relational dynamics using a formal...

Toward Truly Intelligent Autonomous Systems A Taxonomy of LLM Integration for Everyday Automation
April 28, 2025
With the rapid development of large language models (LLMs), their integration into autonomous systems has become essential. This integration significantly...
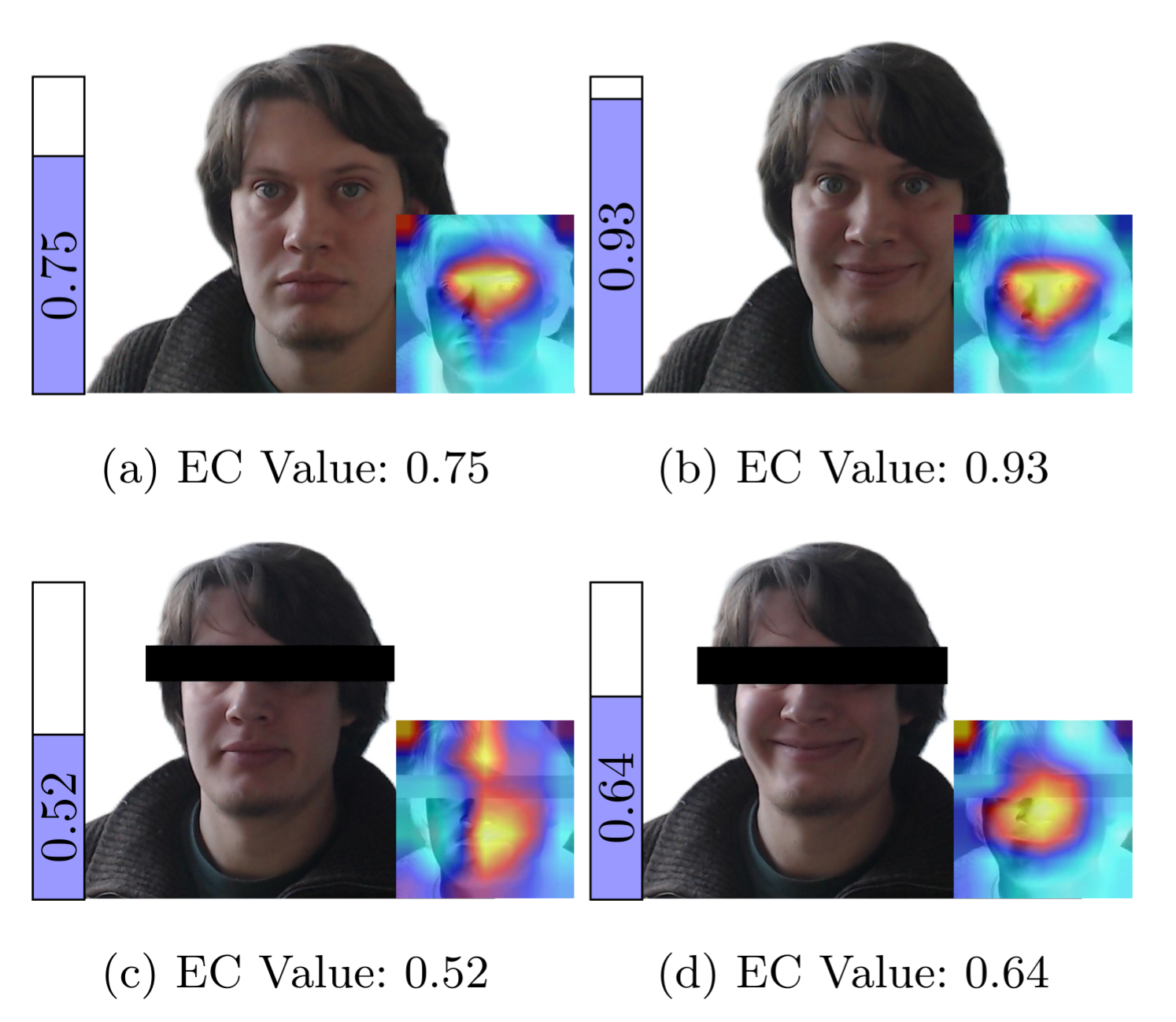
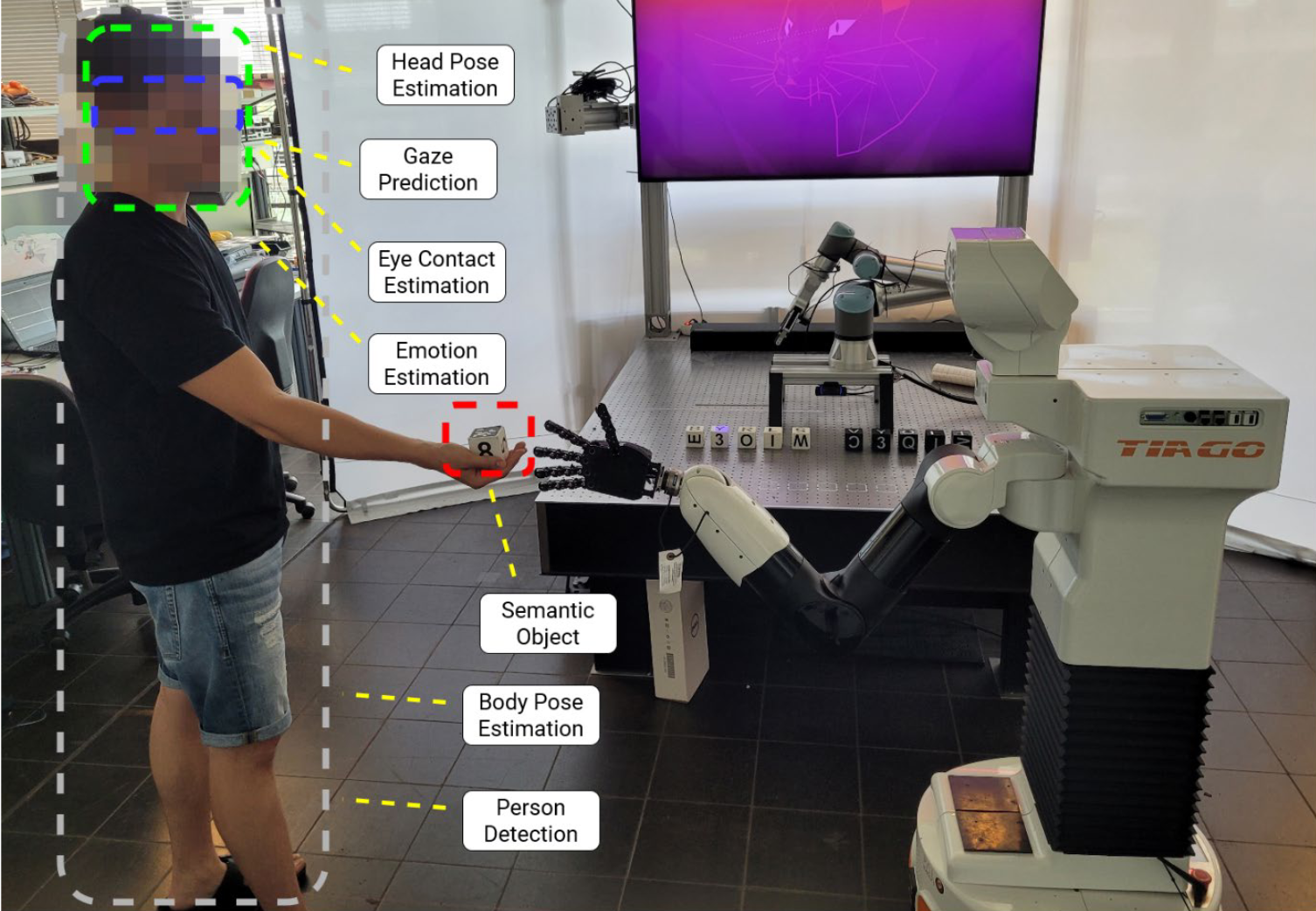
Eye Contact Based Engagement Prediction for Efficient Human-Robot Interaction
April 28, 2025
We introduce a new approach to predict human engagement in human-robot interactions (HRI), focusing on eye contact and distance information....
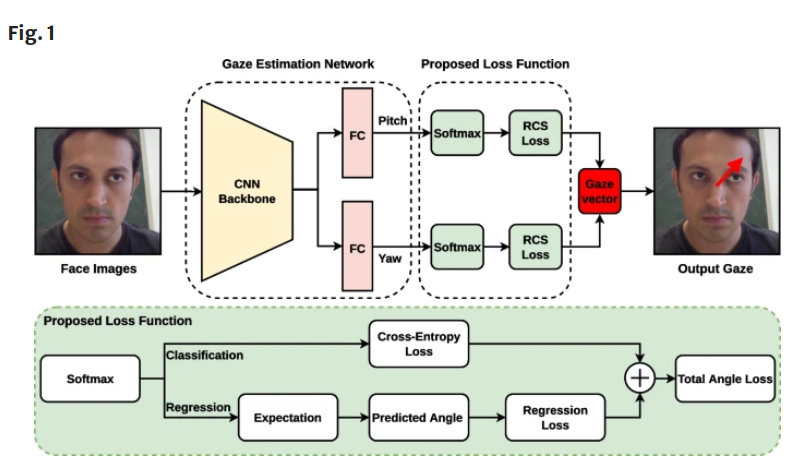
Fine-grained gaze estimation based on the combination of regression and classification losses
September 03, 2024
We present our recent work on gaze estimation. Our approach is a novel two-branch CNN architecture with a multi-loss approach...
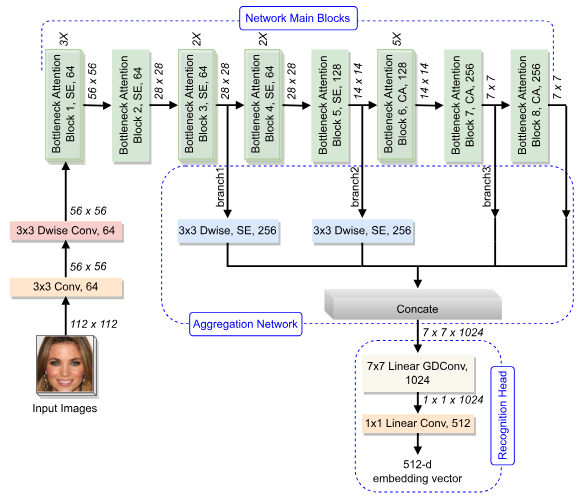
Towards efficient and robust face recognition through attention-integrated multi-level CNN
May 26, 2024
RobFaceNet is a robust and efficient CNN designed for face recognition, achieving a balance between high accuracy and computational efficiency...
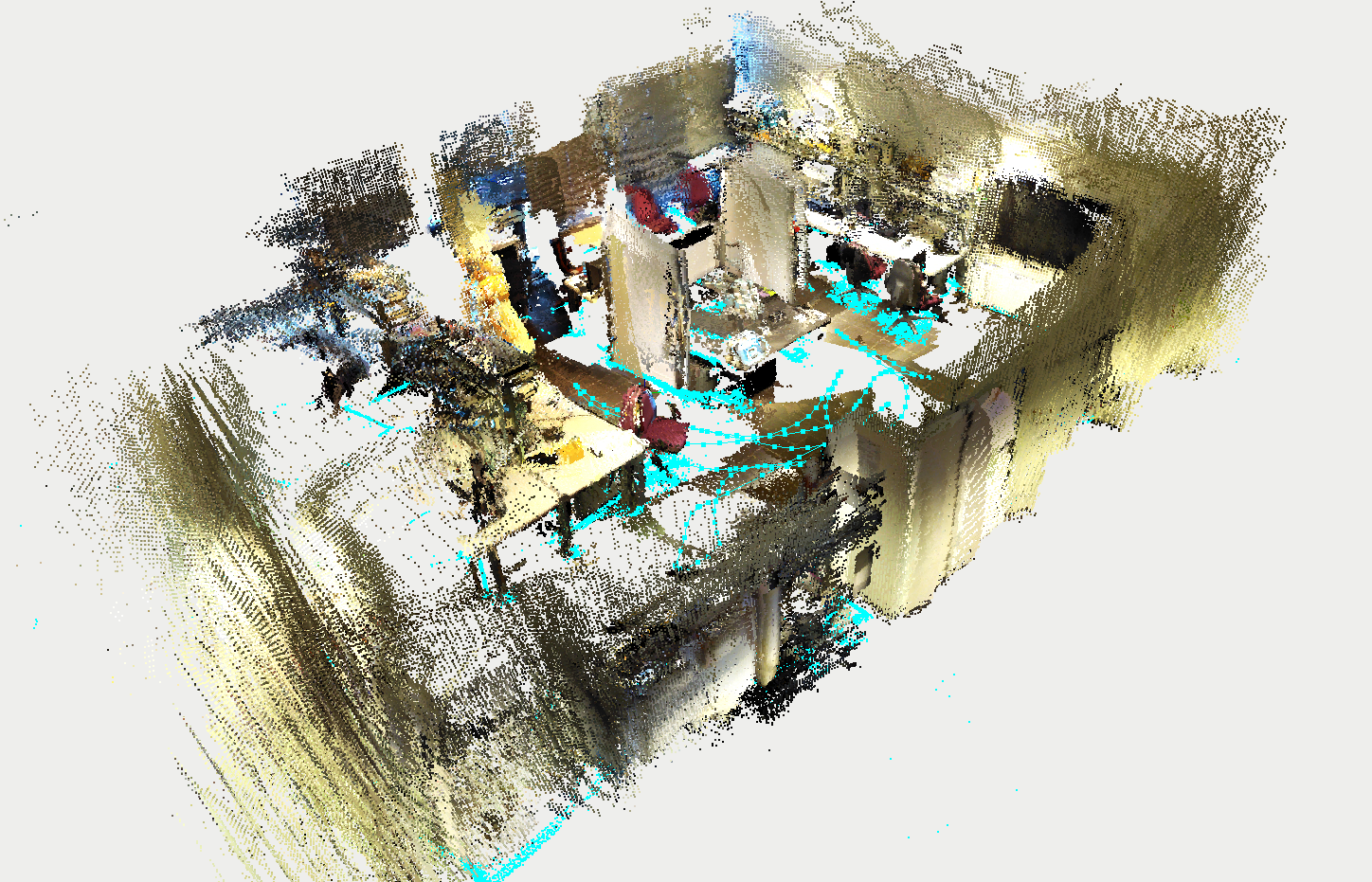
Exploring the State of the Art in Visual SLAM for Robotics
April 11, 2024
Recent advancements in Visual Simultaneous Localization and Mapping (V-SLAM) technologies have significantly enhanced the capabilities of robotic systems. Our latest...

(TIP24) Approaching unrestricted and full rotation head pose estimation!
March 21, 2024
We are delighted to share our newest publication in the IEEE Transaction on Image Processing. In this paper, we tackle...

AutoKoWaT Milestone-Meeting at ZBS in Ilmenau
February 07, 2024
The AutoKoWaT project team met at the Zentrum für Bild und Signalverarbeitung (ZBS) in Ilmenau for a milestone meeting reinforcing...
(WACV24) Our Research Work Reaches Hawaii!
January 06, 2024
Our recent research on eye contact detection for human-robot interaction was accepted by WACV24 and presented at the conference in...

Project Meeting at LUCAS in Jena
October 09, 2023
On October 9, 2023, the project partners from ZBS, MartinMechanic, LUCAS, and OVGU convened in Jena.
(ISC23) On contextual perception of workers in complex production environments
September 08, 2023
We present our recent work on contextual perception in complex production environments at the 60th Ilmenau Scientific Colloquium 08 September...
Single-shot structured light with diffractive optic elements for real-time 3D imaging for collaborative logistic scenarios
August 07, 2023
We present a novel concept for 3D or multimodal imaging based on the principle of structured light to be used...
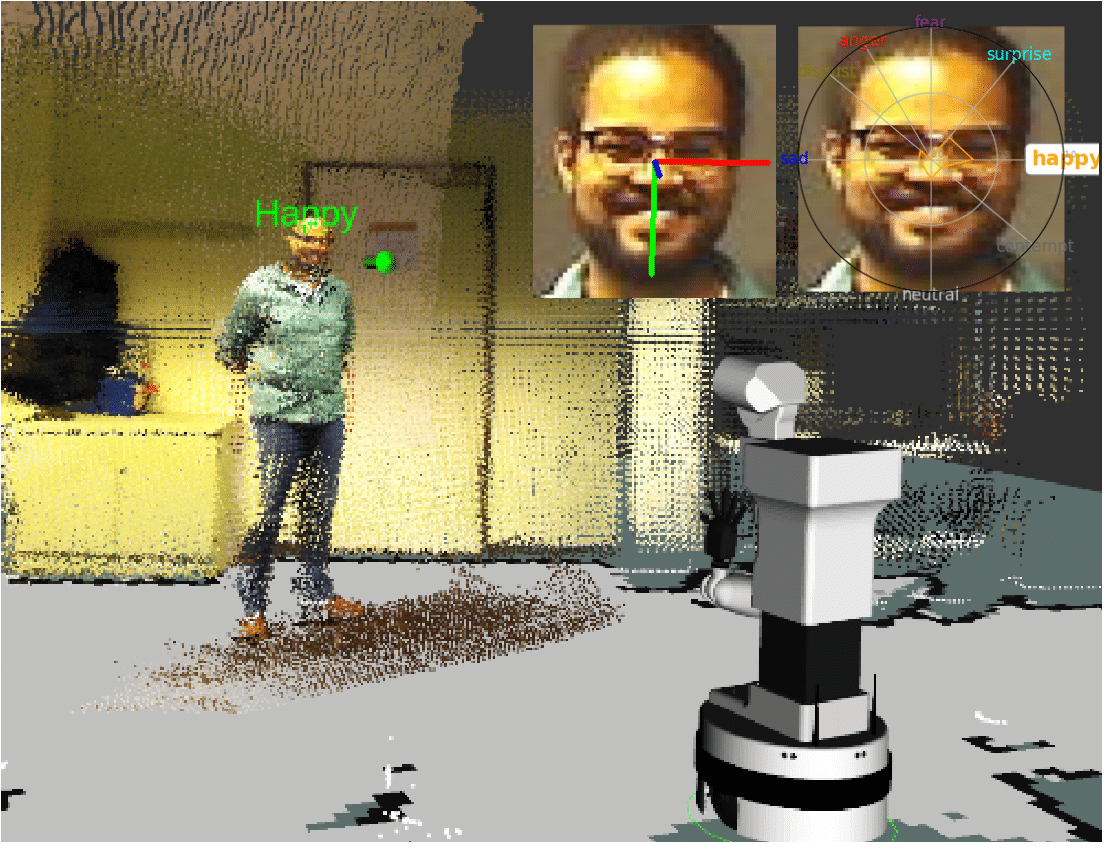
(VISAPP23) Sentiment-based Engagement Strategies for intuitive Human-Robot Interaction
March 06, 2023
I present our recent work on sentiment-based engagement strategies for mobile robots at VISAPP2023 in Lissabon, Portugal.


(ICIP22) 6D Rotation Representation For Unconstrained Head Pose Estimation
October 20, 2022
We present a novel method for robust head post estimation at the IEEE International Conference on Image Processing 2022.